한국어
한국어


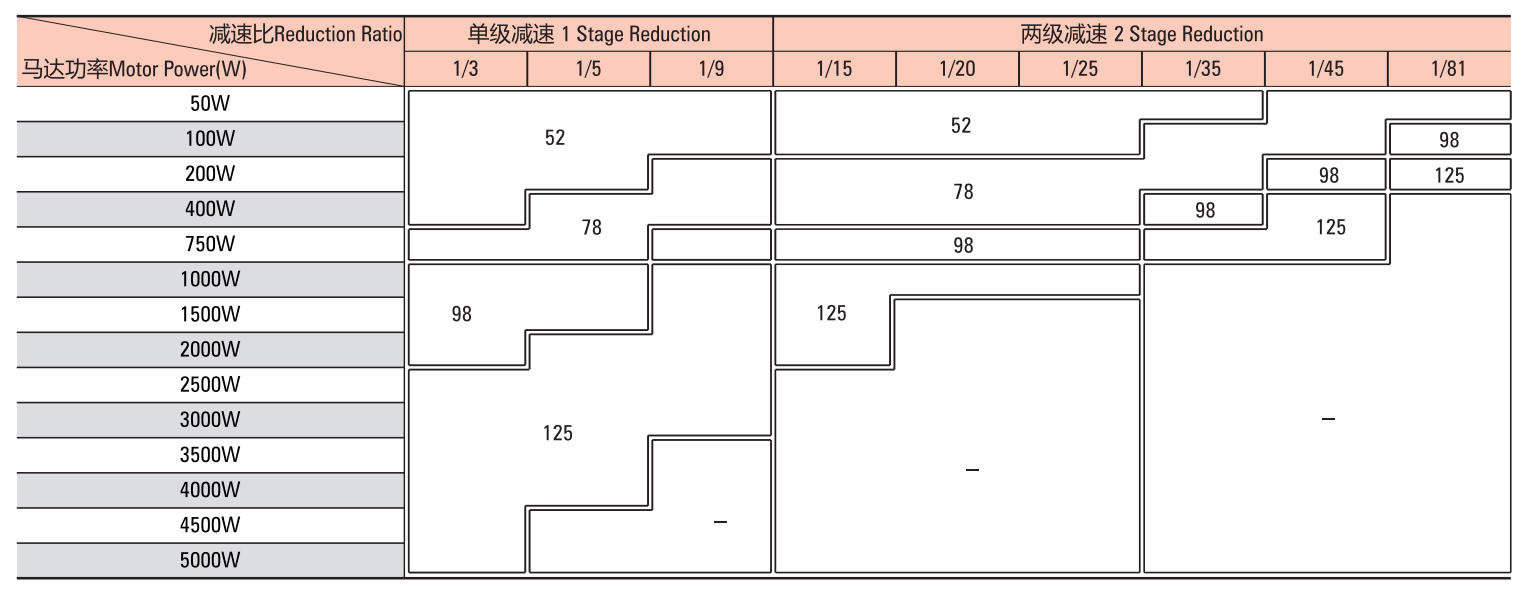 주 1) 모두 헬리컬 기어에 대응
주 1) 모두 헬리컬 기어에 대응 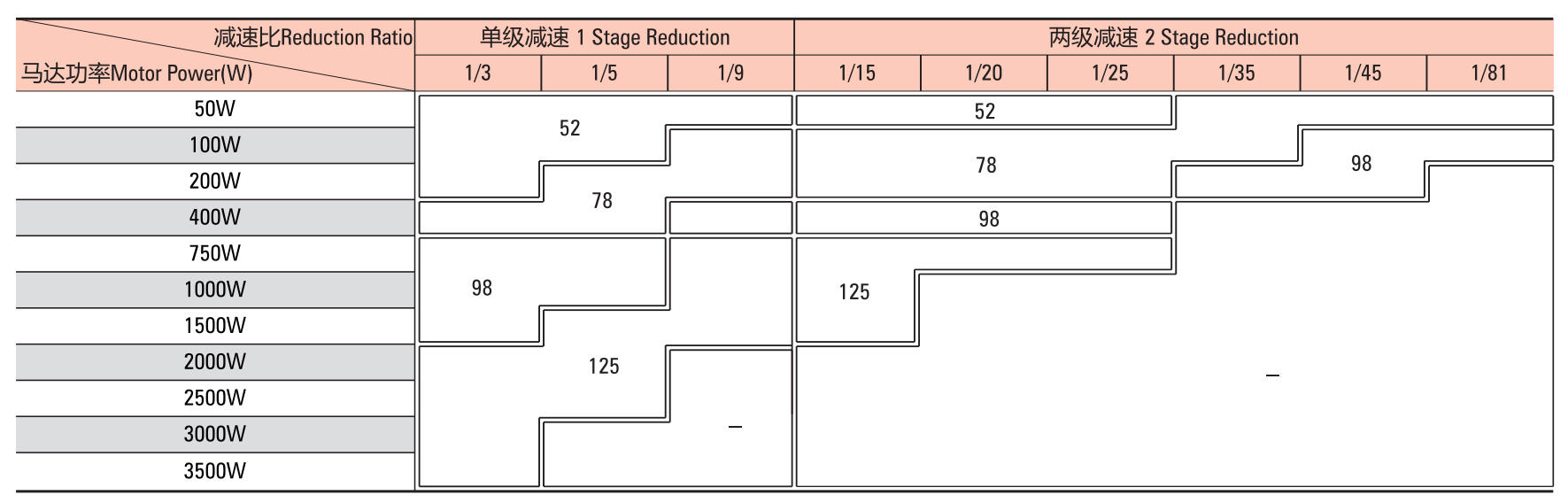 주 1) 모두 헬리컬 기어에 대응
주 1) 모두 헬리컬 기어에 대응 ※ 토크는 다음 유형으로 제한됩니다.
52 : 1/5 감소 (100W) 78 : 1/81 감소 (50W)
98 : 1/3 감소 (1500W), 1 / 45 감소 (200W)
1/81 감소 (100W)
125 : 1/3 감소 (3500W), 1 / 25 감소 (250W)
52 : 1/5 감소 (100W) 78 : 1/81 감소 (50W)
98 : 1/3 감소 (1500W), 1 / 45 감소 (200W)
1/81 감소 (100W)
125 : 1/3 감소 (3500W), 1 / 25 감소 (250W)