 한국어
한국어



모터 특징
■ 인덕션 모터 특징
1, 일반적으로 마이크로 인덕션 모터는 인덕션에 의해 회전하는 모터를 말합니다. 유도 전동기는 시작 및 회전시 커패시터와 전자기에 의존합니다. 시동 토크는 그리 높지 않지만 구조가 단순하고 효율이 높으며 계속 회전 할 수 있습니다.
2, 단상 모터는 작동시 회전과 역방향을 갖습니다. Pis는 모터를 정지시킨 후에 만 단상 모터 회전 방향을 변경합니다.
3, 3 상 모터는 3 상 전원에 의존합니다. 고효율이며 높은 시동 토크를 얻을 수 있습니다.
■ 리버시블 모터 특징
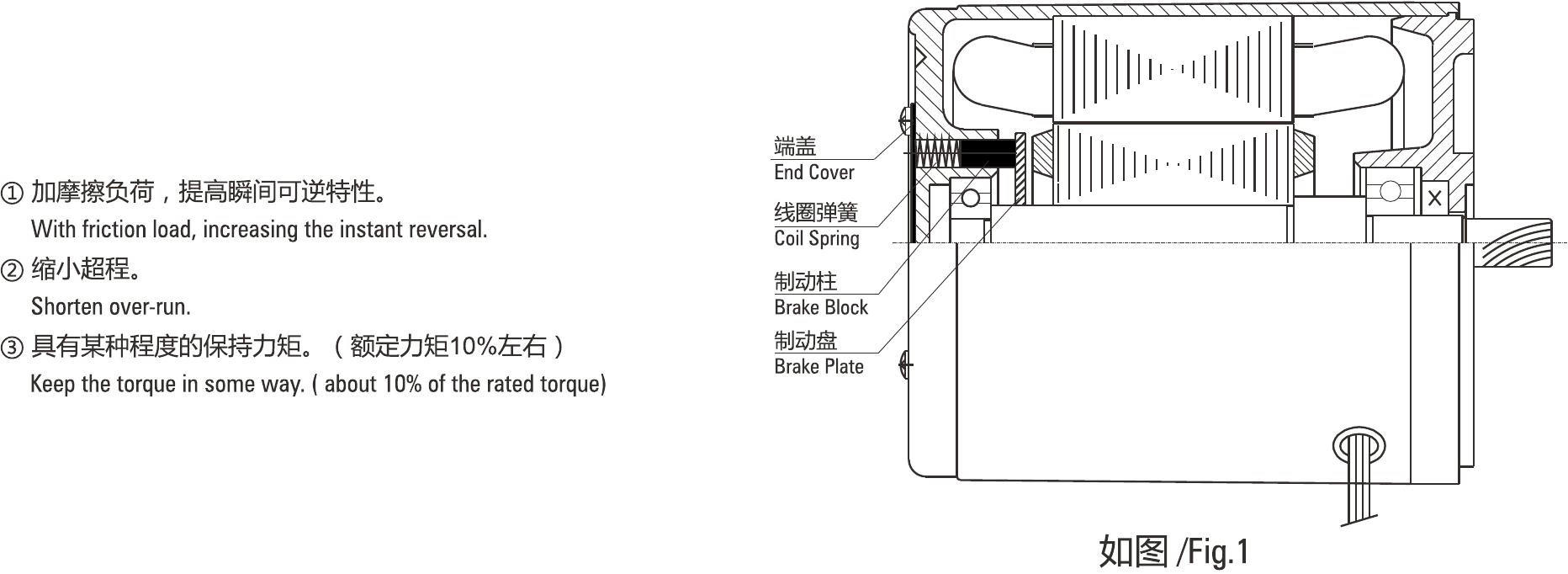
1, 리버시블 모터에는 모터 본체 뒷면에 마찰 브레이크가 있으며 방향 반전이 자주 필요한 응용 분야를 위해 설계되었습니다. 마찰 브레이크의 경우, pls check Draw 1을 확인합니다. 스프링이있는 습기는 회전하는 브레이크 디스크에 영향을 미치고 연속적인 프레스를 공급합니다. 마찰 브레이크의 기능은 다음과 같습니다.
2 、 마찰 브레이크 및 오버런의 유지 토크 이상은 표 1에 기재되어 있습니다. 참고 용입니다. 온도뿐만 아니라 회전주기에 따라 변하기 때문에. Pls는 또한 초기 작동시 토크가 표에 나열된 것보다 약간 낮을 수 있습니다.
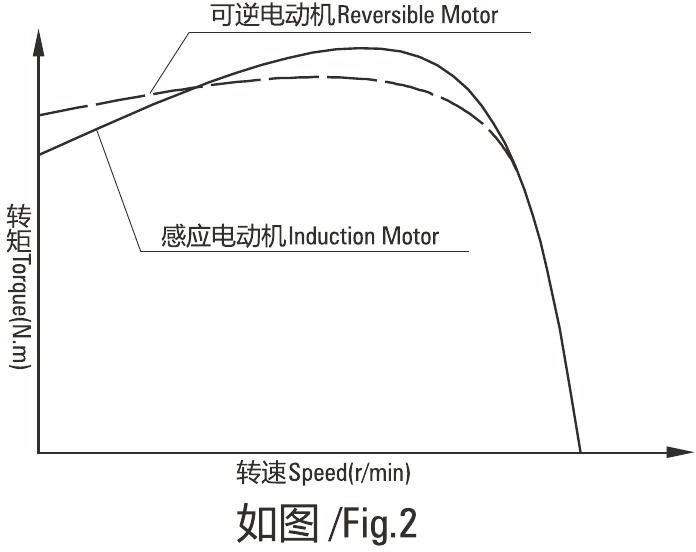
3, 인덕션 모터와 마찬가지로 가역 모터는 커패시터에 의해 시작되며 인덕션 모터와 동일한 토크 특성을 갖습니다. 그러나 리버시블 모터는 순간 반전 기능을 높이기 위해 더 높은 시동 토크로 설계되었습니다. Pls 확인 도면 2.
■ 표 1. 토크 유지 및 오버런
| 단계 | 크기 | 산출 | 모터 모델 | 토크 유지 | 오버런 | |
| mm | W | N.cm | Kgf.cm | 사이클 | ||
| 단상 | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■ 전원 차단 활성화 형 전자기 브레이크 모터 특징
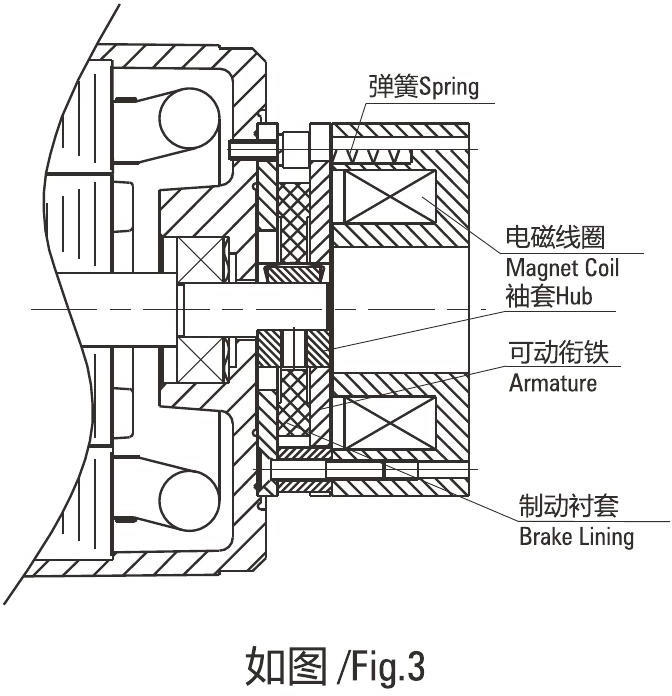
1, 구조 및 작동 원리
표 3은 전자기 브레이크 모터의 구조입니다. Power Off Activated Type을 생산합니다. 권선에 전압을 가하면 스프링에 의해 눌러 진 전기자가 자화됩니다. 모터는 전기자와 브레이크 림 사이에 백래시가있을 때 회전 단계에 있습니다. 권선 전압이 낮아지면 스프링의 영향으로 전기자가 브레이크 림을 눌러 브레이크 힘을 생성합니다. 그런 다음 모터가 정지합니다.
2, 전자기 브레이크의 특성
모터와 직접 연결되는 AC Power Off 활성화 형 전자기 브레이크입니다. 전원이 꺼지면 깜박임이 멈추고 부하가 유지됩니다. 0.05-2.0 N.m 사이의 토크를 유지합니다. 무의식적으로 전원이 꺼지는 상황에서 안전 브레이크에 특히 적합합니다. 전자기는 방향을 자주 변경할 수 있습니다. 1 분에 6 번 멈출 수 있습니다. 그러나 3 초 이상 지속되는지 확인하십시오.
브레이크에 정류 루프를 설정하면 모터와 전원을 공유 할 수 있습니다.
※ 값은 기준입니다. 다른 조건으로 변경됩니다. 실제로 사용하는 경우에는 모터 표면 온도를 90 ° C 이하로 해주십시오.
3, 시작 시간 및 브레이크 시간 기능
시작 시간은 모터의 시작 시간에 전자기 브레이크 해제 시간을 더한 시간을 의미합니다. 브레이크 시간은 전원이 차단 된 후 모터가 완전히 정지 할 때까지의 시간을 의미합니다. 오버런, 시작 시간 및 브레이크 시간은 애플리케이션에 따라 달라집니다.
■ 표 2. 전자기 브레이크 (전원 차단 작동 형)
| 단계 | 크기 출력 | 전압 V | 주파수 Hz | 현재 A | 입력 W | 토크 유지 | 오버런 | ||
| MM | W | N.cm | Kgf.cm | 사이클 | |||||
| 단상 | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 상 | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 ~ 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 ~ 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 ~ 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■ 속도 제어 모터의 특징
1, 컨트롤러와 모터의 단위입니다. 한 번만 연결하면됩니다. 속도는 전위차계로 쉽게 조정할 수 있습니다. 컨트롤러는 속도 제어 루프, 커패시터, 속도 제정 등으로 고정되어 있습니다. 장치에서 즉시 정지 기능은 없습니다.
2, 컨트롤러는 50Hz에서 90-1350rpm과 60Hz에서 90-1650rpm 사이에서 속도를 변경할 수 있습니다.
3 、 과열을 피하기 위해 모터를 저속으로 장시간 운전하지 마십시오.











