■ 기어 모터 토크 테이블
● 기어 헤드와 미드 기어 박스는 별매입니다. 모델 이름 내의 상자 (□)에 터미널 박스 유형 (T)을 나타내는 코드를 입력합니다.
● 모델명 내 상자 (□)에 기어비를 입력합니다.
● 속도는 모터의 동기 속도 (50Hz : 1500r / min 、 60Hz : 1800r / min)를 기어비로 다이빙하여 계산합니다. 실제 속도는 부하의 크기에 따라 변위 값보다 2 % -20 % 적습니다.
● 표의 qear 비율 이상으로 속도를 줄이려면 감속기와 모터 사이에 중간 기어 박스 (기어비 : 10)를 부착하십시오. 이 경우 허용 토크는 20N.m입니다.
■ 허용 토크 단위 : 상 (N.m) / 하 (kgf.cm)
| 유형
모터 / 기어 헤드 | 기어 라토 | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 12.5 | 15 | 18 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 |
| 속도
r / 분 | 50Hz | 500 | 417 | 300 | 250 | 200 | 166 | 120 | 100 | 83 | 60 | 50 | 42 | 30 | 25 | 20 | 16 | 15 | 12 | 10 | 8 |
| 60Hz | 600 | 500 | 360 | 300 | 240 | 200 | 144 | 120 | 100 | 72 | 60 | 50 | 36 | 30 | 24 | 20 | 18 | 15 | 12 | 10 |
| 5IK40GU-A □
5IK40GU-E □
5IK40GU-C □
5IK40GU-H □
5IK40GU-S □ 5IK40GN-S3 □ | 5GU □ RC
5GU □ RT | 허용 토크 | 50Hz | 0.57 | 0.68 | 0.59 | 1.14 | 1.58 | 1.89 | 2.63 | 3.16 | 3.79 | 5.26 | 6.31 | 6.8 | 9.5 | 11.4 | 14.2 | 17.0 | 18.9 | 20.0 | 20.0 | 20.0 |
| 5.80 | 6.96 | 9.66 | 11.6 | 16.1 | 19.3 | 26.8 | 32.2 | 38.6 | 53.7 | 64.4 | 70 | 97 | 116 | 145 | 174 | 193 | 200 | 200 | 200 |
| 60Hz | 0.46 | 0.55 | 0.76 | 0.92 | 1.27 | 1.53 | 2.12 | 2.55 | 3.05 | 4.24 | 5.09 | 5.50 | 7.64 | 9.16 | 11.5 | 13.7 | 15.3 | 18.3 | 20.0 | 20.0 |
| 4.67 | 5.61 | 7.79 | 9.35 | 13.0 | 15.6 | 21.6 | 26.0 | 31.2 | 43.3 | 51.9 | 56.1 | 77.9 | 93.5 | 117 | 140 | 156 | 187 | 200 | 200 |
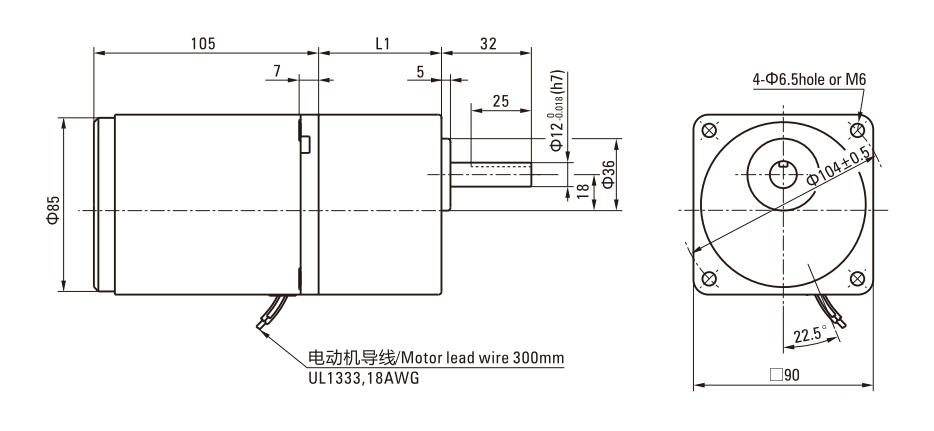
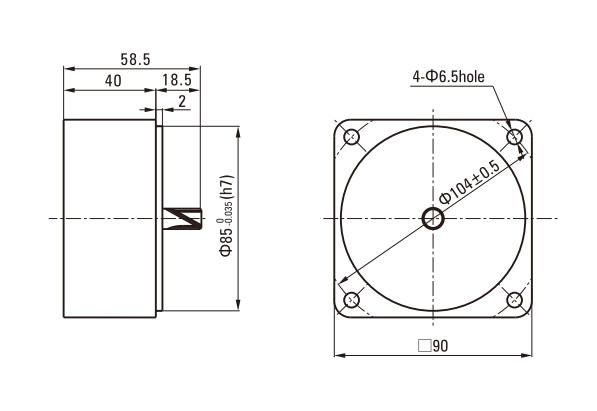
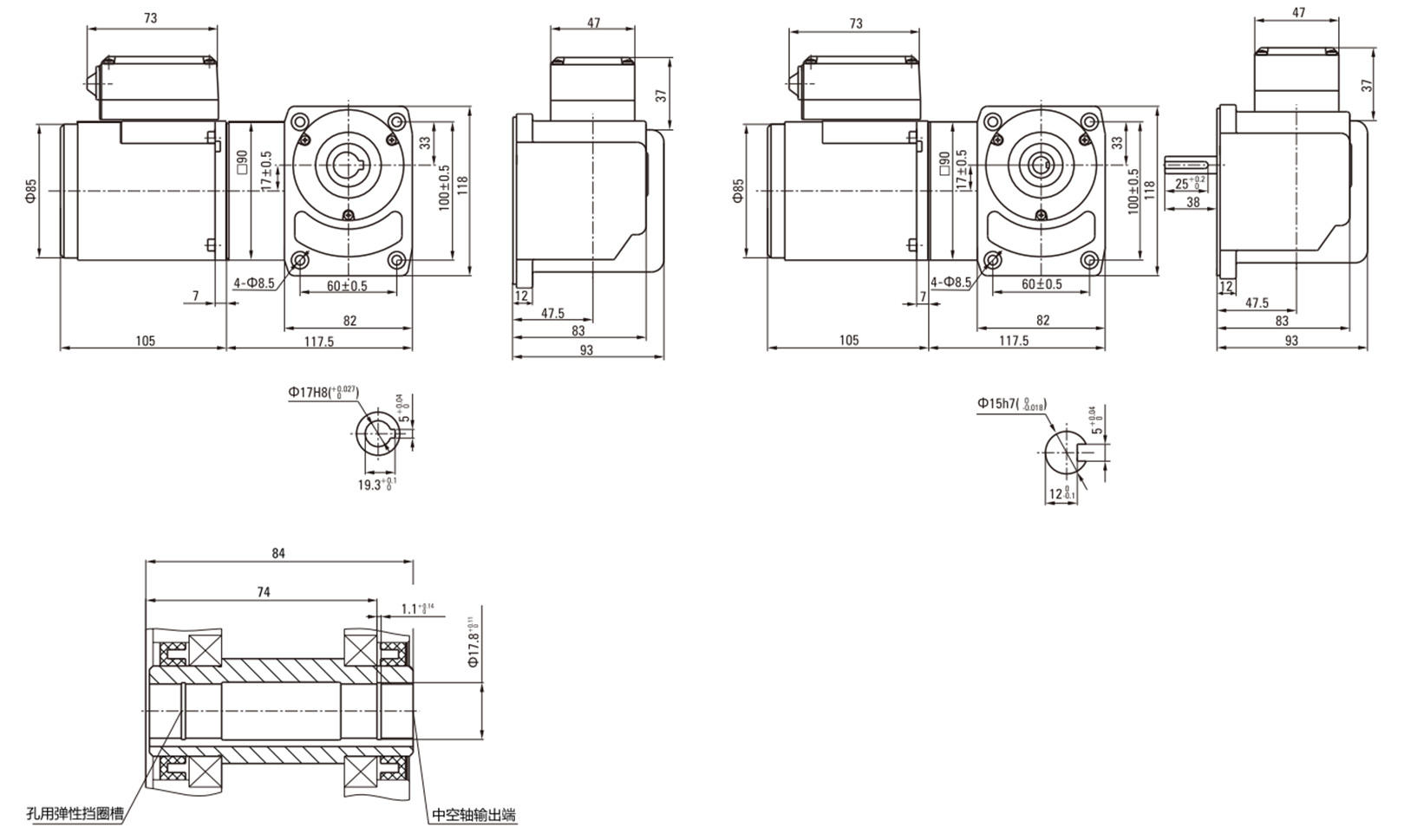
■ 유도 형 도면


■ 기어 모터 토크 테이블
기어 헤드와 미드 기어 박스는 별도로 판매됩니다. 모델 이름 내의 (口) 상자에 터미널 박스 유형 (T)를 나타내는 코드를 입력합니다.
모델명 내 (口) 란에 기어비를 입력합니다.
속도는 모터의 동기 속도 (50Hz : 1500r / min 、 60Hz : 1800r / min)를 기어비로 다이빙하여 계산합니다. 실제 속도는 부하의 크기에 따라 표시된 값보다 2 % ~ 20 % 적습니다.
표의 기어비 이상으로 속도를 줄이려면 감속기와 모터 사이에 중간 기어 박스 (기어비 : 10)를 부착하십시오. 이 경우 허용 토크는 20N.m입니다.
■ 허용 토크 단위 : 상 (N.m) / 하 (kgf.cm)
| 유형
모터 / 기어 헤드 | 기어비 | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 12.5 | 15 | 18 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 |
| 속도
r / 분 | 50Hz | 500 | 417 | 300 | 250 | 200 | 166 | 120 | 100 | 83 | 60 | 50 | 42 | 30 | 25 | 20 | 16 | 15 | 12 | 10 | 8 |
| 60Hz | 600 | 500 | 360 | 300 | 240 | 200 | 144 | 120 | 100 | 72 | 60 | 50 | 36 | 30 | 24 | 20 | 18 | 15 | 12 | 10 |
| 5IK40GU-A □
5IK40GU-E □
5IK40GU-C □
5IK40GU-H □
5IK40GU-S □ 5IK40GN-S3 □ | 5GU □ RH
5GU □ RA | 허용
토크 | 50Hz | 0.41 | 0.50 | 0.62 | 0.74 | 0.93 | 1.11 | 1.55 | 1.86 | 2.23 | 3.09 | 3.71 | 4.46 | 6.19 | 7.43 | 9.28 | 11.1 | 12.4 | 14.9 | 18.6 | 20.0 |
| 4.21 | 5.05 | 6.31 | 7.58 | 9.47 | 11.4 | 15.8 | 18.9 | 22.7 | 31.6 | 37.9 | 45.5 | 63.1 | 75.8 | 94.7 | 114 | 126 | 152 | 189 | 200 |
| 60Hz | 0.33 | 0.40 | 0.50 | 0.60 | 0.75 | 0.90 | 1.25 | 1.50 | 1.80 | 2.50 | 2.99 | 3.59 | 4.99 | 5.99 | 7.49 | 8.98 | 9.98 | 12.0 | 15.0 | 18.0 |
| 3.39 | 4.07 | 5.09 | 6.11 | 7.64 | 9.17 | 12.7 | 15.3 | 18.3 | 25.5 | 30.6 | 36.7 | 50.9 | 61.1 | 76.4 | 91.7 | 102 | 122 | 153 | 183 |
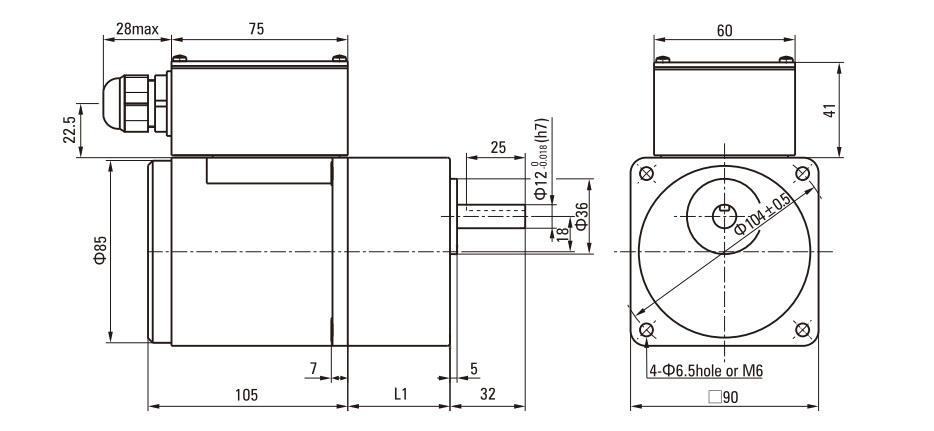
■ 유도 형 도면

■ 결선도
● 모터의 회전 방향은 모터 축단에서 본 방향입니다. CW는 시계 방향을 나타내고 CCW는 시계 반대 방향을 나타냅니다.
● 일람표에 기재된 명칭은 피니언 축형이며, 동급의 환축 형에도 유효합니다.
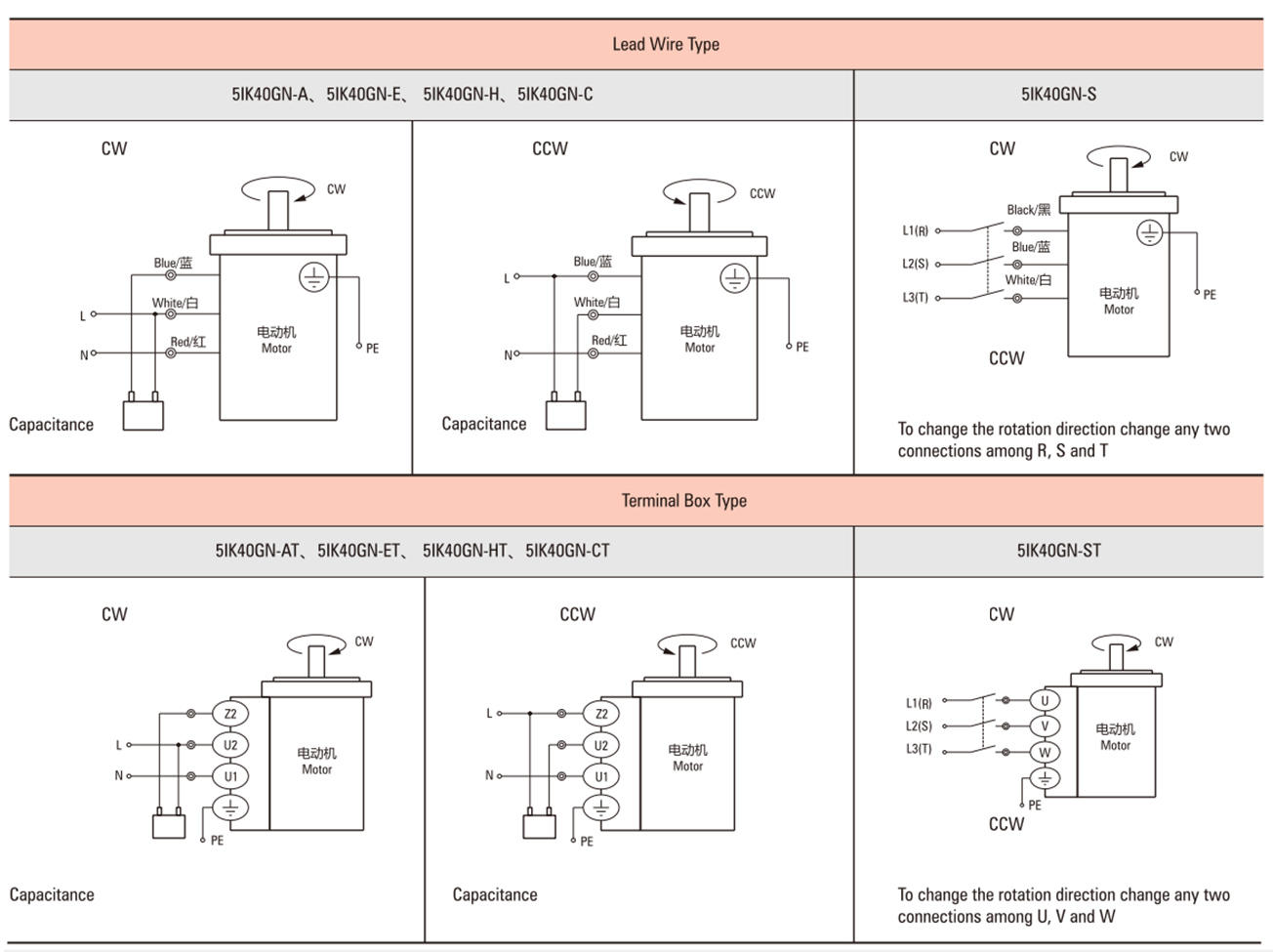
노트 :
모터를 정지시킨 후에 만 단상 모터 회전 방향을 변경하십시오.
모터가 회전하는 동안 회전 방향을 변경하려고하면 모터가 반전 명령을 무시하거나 약간의 지연 후 회전 방향을 변경할 수 있습니다.
 한국어
한국어